As diversas posições da extremidade de um braço robótico podem ser identificadas por ternas (x, y, z) em um sistema cartesiano ortogonal de três eixos, XYZ.
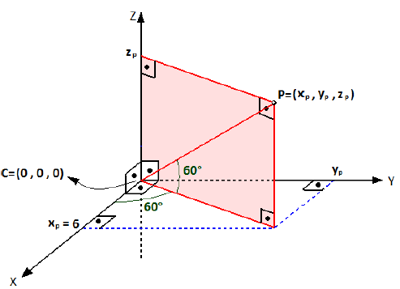
Na figura a seguir, o sistema XYZ tem centro C = (0, 0, 0), e P representa um ponto de coordenadas ( Xp, Yp,Zp ), que corresponde a certa posição da extremidade do braço robótico.
De acordo com os dados disponíveis na figura, P tem coordenadas